Keith Hack has moved to Titan Lab @ http://www.titanlab.co
Visit and learn about the new posts, videos, and startups coming soon
Friday, March 8, 2019
Friday, May 5, 2017
Startup Musings–Pricing your product
I haven’t been writing very much. Life can be busy and while I try and stay up to date with everything in the sports world, it can be a little tough. I’ve debated trying to do some of this stuff via video on youtube to help share the knowledge but it’s not something I have always have the time, the hardware (recently “downsized” to a Core m laptop), or the video equipment for. I may in the future given a camera upgrade.
So until I find the motivation and the money, it’s text. So thanks for reading.
In the last few months I get pulses of emails. Sometimes I reply right away, and sometimes not.. or never. So I want to discuss (see radio definition) is a recurring theme in these emails. Several people have asked me about the mythical open source or android phone head unit. It’s prompted by the theoretical “if I can buy a 100 dollar android phone that has all the same hardware why is my Garmin / Polar / Sunnto device with less power 300/400/600/etc dollars! It’s a scam”. Okay, so that isn’t an actual quote. When I first started this blog I didn’t understand anything about products, marketing, sales and pricing. Now I know about 1% and I’m rounding up. Bear with me and this might make sense.
The TLDR of why (because I'm a wordy person) is
1) Different distribution models + hardware turns a $100 phone into a $500+ head unit
2) Devs – You trade one type of development for another type. It’s not easier, just different, and expensive
3) Durability – Slightly different ideology here
4) Screens – Need a custom one or make trade offs. Period.
5) What’s different? To be a killer device it needs to offer something different, something "better". An Android head unit isn’t blue ocean – it’s a a head unit. What’s unique?
Lets examine the least important on the road to the super cheap android phone head unit but in the reverse order. Then I’ll make a comment on the Hammerhead Karoo (Spoiler: I’m rooting for them)
Is it blue ocean – Great if it is but what if it’s not?
I wish I had more experience here. I’ll get it in the coming years. I never suggest anyone to enter into a price war competition unless you have an ace up your sleeve on some other innovation (market, distribution, manufacturing, etc – more later). Having something incrementally different doesn’t win you the war. Starting a price war can get you noticed, but you have to deliver and keep delivering. And for head units you’re going to lose on features – Sorry, it’s your lack of resources as a startup. Time to undercut it. If company X charges 1000 and you want to make a splash it needs to be less. How much? It depends and I don’t have those answers. However there are magic numbers. 499 is one, 299 is another. There is a psychology on pricing. People buy based on emotion and a price can illicit a feeling.
Even if your product isn’t innovative you can cause other disruptions. They can be in manufacturing, sourcing, and distribution models. Canyon bikes is an example of changing the market by the use of a direct sales model to reduce price. However, someone has to assemble that bike, and shops tend to upsell labour when the bike didn't come from their store. In fact I’ve read on forums of bike shops double or tripling service prices specifically on Canyon because of their sales model. Obviously that’ll just hurt the shop but only in the long run.
Canyon is unique but for us slobs the normal distribution model is how most things get sold. Skip ahead to the last main section if this is all you care about.
Devs are expensive – like really
So you have an ARM platform. Great. One guy can port the reference code to the latest AOSP build and viola you have the latest android. Job done. Nope.
Go and download almost any cycling application and see how well it works. If you have any sensors good luck if it’s not a big company. Why is that? Well, multiple phone OS’s, servers, an “ecosystem”, and more all takes time. It takes Garmin and others tens of engineers to write the firmware for their cycle computers and integrate them with apps. In the Edge 500 days maybe 1 to 2 but now, with expectations of connectivity, BLE, ANT+, Wifi, syncing, alerting, etc you need more.
Seriously though, you’ve got bodies. Switching to android didn’t reduce the workload, it shifted it. You might need to amortize at least 10 x 80k/year salaries for about a year or you need to have the charm and wit of a better CEO than Richard Branson. So you need to amortize at least about 1 million dollars to get that product out the door. 1 Million. At about 50 dollars a unit of theoretical profit (first estimate we’ll see later) you need to sell about 20k in the first year to pay for that… and still being in debt the same amount the next year. Hardware needs a lot of this money up front. There are slower routes, but this is the do it in a year or two method.
Screens – Your sample size is small and you should feel ashamed of yourself
I’m going to have to shoehorn an explanation of why I used that quote, but stick with me. If you want an LCD to be viewable you have three options
- Reflective – think B/W watches normally
- Transflective – old iphone, Garmin’s (all), anything that says “daylight viewable”
- Transmissive – your phone, computer, tv. So outdoors you need power to overcome direct sunlight.
iPhone’s up to version 4 were Transflective. They had a hole in every pixel that light goes down through and scatters and reflects back up. However, the first Retina display tried it and so little light made it’s way back up that they scraped it and went to Transmissive only on the next version – they did this by jacking up it’s backlight and setting a new standard for brightness in displays. 600 nits = “okay” for outdoor use. Okay, not great. Daylight viewable became daylight “usable” with a caveat of “sorry battery, you must die my friend, and soon”.
I get lots of people saying “it’s easier to see the Wahoo Elemnt” to which I respond “yes, it is Black and White”. That’s important. Yes it’s viewable, but without colour it can’t easily differentiate features, types of roads, etc. However, with colour, the technology is trash and we resort to running the backlight during the day to get it a helping hand (thus killing our batteries). Readability is directly traded for mainly mapping features here. Some companies have accepted this and made the trade because of the custom screen problem. It’s not really useful to navigate if you can’t understand if it’s a trail, a road, a bike path, or a small river.
While I haven’t torn down an Elemnt, a Stages Dash, or an SRM PC8 they have one thing in common. I mean literally the exact same thing. The screen is a Sharp Memory LCD and the exact same one. I could literally pull the screen out of one and plug it into another. I can order this from Digikey and because of their magical shipping Wizards I have the replacement tomorrow (pending ordering before about 5pm).
While breaking a Garmin screen is rare, it’s possible, but try and find a replacement. You can’t. Not China, usually not ebay (unless pulled from another unit), nada. Why? It’s 100% Grade A fully custom with 100k + setup cost.
I’ve looked and got quotes, and getting a transflective colour screen falls into a few categories
- 70 – 120 dollars USD for the screen… in medium volume (5000 units) for off the shelve.
- Can be less, but requires accepting lower quality I found or other weird things. Like uncertainty in the supply chain
- Chinese that says in one document it’s transflective, and in another it’s transmissive
- Custom = 100k USD setup fees and about 30 – 40 per unit with MOQ of usually 10k, 140k for 10k screen or an additional $14 a screen. Yes, a $54 dollar screen with 540k outlay. (yes this is half a million dollars).
- Old iPhone screens but limited volume supplies (messed up MPL interface too, needing encoder chips)
- Sharp Memory LCD if you don’t mind limited sizes and B/W
- Actually they have an 8 colour one but not in a good shape or resolution for cycle computers
- They can do custom but see above
And, yes, colour transflective screens suck. It bears saying again They suck a bunch. Low contrast, bad brightness, etc. All symptoms of how they work. Tiny 15% hole has to let in light for the other 85% that runs through 3 filters sequentially. Not much light getting through. The Edge 500 was transflective B/W LCD. High contrast, low res, B/W.
However, you know what else sucks… power… and a lot of it. High brightness backlights. Talking about 200 – 300 mw for the backlight. So that 1300 mah battery, common in cheap phones can only do 16 hours… with the backlight on and the phone off. And also, run a phone playing a video with the screen on full brightness and measure how many minutes you get? 180? 250 minutes? not 15 hours.
Some promising tech has also died, like Qualcomm Mirasol demo’d in the Toq Watch. Nothing else is really available. Sharp is the best potential for the future I’ve seen but it’s still expensive with 30 – 40 dollar screens in volume.
Durability – My phones totally durable – you know, with an otterbox
Okay, this isn’t huge, but you need to design for different abuse. Not necessarily more or less, but different. That means the design is different, so stock engineered bodies aren’t the solution so OEM rebranding of an Alcatel (Blackberry?) won’t cut it. You’ll also want some custom hardware in there and designed for those pesky IPx7/x8 tests that phones are only starting to do – and you pay a premium for it! NRE = non-refundable engineering. The Non-Refundable is the important bit. You don’t get it back. And in some cases, depending on the contract, if they fail to deliver you still don’t get it back. Most startups will do this in house but getting waterproofing right is hard. Most don’t get it on a first try.
You also don’t have the volume of a phone carrier so every piece of custom hardware you want is more expensive. That fiber reinforced injection mold must be EDM cut taking weeks, or adjusted to fit. That’s tens of thousands of dollars. The ultrasonic welding horn, that’s several thousand dollars, assembly is based on volume and estimates so you have to buy units up front with cash and stockpile functional units. It’s a lot of money because you need custom parts to be durable. And as previously talked about – You will likely need a custom screen.
You’re likely going to have to amortize 200 – 300k of tooling here over how many units? potentially 100k units but that could be 2 – 4 years out. What if, like above, it was only 10k units? Your per unit cost just went up 20 – 30 dollars on average.
Distribution Model – Who’s eating your lunch?
I have some friends who’ve been working on a medical startup for a few years now. It’s hard, but one thing they said that I’ve heard echo’d in many books: “don’t let someone eat your lunch”. The idea with blue ocean startups being that make sure you’re working hard to not let a competitor steal your idea, clients, and sales. However, your lunch can get eaten in other ways. The distribution model is one of them.
Most people I talk with have zero idea about how product A gets to consumer B and without this understanding you have no idea how to set your MSRP (manufacturer suggested retail price, or SRP). And honestly, I’m like 1% better than the person I described.
The distribution models of cell phone and head units are very different. Most mobile phone companies use a are direct sales models. The manufacturer sells it to the retailer directly and the retailer tends to subsidize it (AT&T, Virgin, Vodafone, Bell, etc) and then people don't see the true cost. The “retailer” is actually a service provider and they aren't profiting from phones but cell phone plans. We all know this but we don’t internalize it. It’s important to understand that when you sell a head unit the customer is the user and the distribution model is the problem that is in the way. With cell phones the service provider is the customer, NOT the user. Now this is changing a bit with more and more people buying cell phones outright but generally I believe this is still true.
Recently I read an article on Xiaomi’s profit margin per phone being razor thin (another one here). In the single digit percentages. They play a volume game. That makes sense considering what I described above. They aren’t ordering 10 units (a small LBS volume for a month or two) or 1000 units (large cycle shop disti) but they are ordering 100000+ units.
A Garmin device, or any other sports electronics, on the other hand goes to a distributor then a retailer. There is a 20 to 40 percent markup at each time. They aren't dealing with the same volume nor subscription models. So rule of thumb is that your MSRP needs to be 3 times your COGs (cost of goods).
Lets take a 100 dollar android phone. Since the phone might be < 10% profit to the manufacturer and maybe only a few points for the retailer we’ll call it 80 dollars and lets say this is the COGS (cost of goods) + amortized tooling.
Your product costs 80 dollars to build and you need profit from that to pay people. So you probably want the largest chunk of the pie (you should, why is a retailer or distributor making more money than you? No seriously!).
Some distribution wants 40% and a bike shop or retailer wants 40 percent on accessories. These numbers can vary from 20 – 40% each. It depends a lot on many factors.
Assuming you want a higher but reasonable 60% (on your COGs) what’s the math
80 * 1.60 * 1.402 = 250
So the minimum you can sell in a high volume product is about 3 times your COGs. However, lets go a little further. Most of the phones I know are still subsidized a bit and usually shady characters unlock the phones.
I have a moto e (LTE, snapdragon 410), I got it “new” but unlocked in a Telus box (I got a code handwritten a torn off piece of loose leaf, the phone was sealed, and a wink of “it’ll work, I promise”). 80 dollars. However, it’s real retail price that is profitable was between 150 – 180. At about 120 COGs estimate lets see what happens to a modern phone. $380 MSRP. Ouch.
Lets pull this phone apart and add in a few things.
- Larger battery, quick charging capable ($3 – $5)
- Improved Inertial, GPS, and Baro ($5)
- ANT+ capability (if it doesn’t already have it, $3)
- Transflective screen (Most low end screens for mobiles are about < $20 in volume, we have a calc, so this is +$34)
Lets run this math again (one more time, I swear, that’s it)
(120 + 5 + 5 + 3 + 34) *1.6 *1.42 = $523.7
Guys, I think we hit the magic number of reality. Ouch. A few modifications to the pricing gave me over a 500 dollar retail price for a 100 dollar android phone.
This is where I say the dream of a 100 dollar android phone as head unit is dead. Not quite. However, you just have to look at the Acer Xplova and see that these estimates are not far off. It’s hardware would be barely in a 100 dollar phone but it’s much much more than that. The distribution models are so different. It would take doing something very different to change this price model. Maybe you’d get it into a LBS for 20% disti and 20% retail margin but that shaves $100 off the price, not $400. Unless your name is Apple don’t expect disti’s and retail to accept 5 – 10% margins. It doesn’t happen (unless it’s food? an edible android head unit!)
Hope. Hope is not lost. It comes at the expense of something else though. Selling through direct channels like website sales is a start, but many small companies can’t handle the logistics. This is one of the potential deaths of a Kickstarter – logistics. A lot of times this is outsourced to a fulfilment house which operates on a similar model of profits as…. a disti. However, you usually lose control.
I have a friend who works at a company that makes a car accessory. It’s unique in what it can do but on a glance people think it’s the same as a Chinese product that doesn’t offer the functionality. However, there have been a number of times someone stuffs a Chinese item back into the box (looks kind of similar) to get their money back. The problem is the fulfilment house doesn’t inspect returns very well. They take a major lose when this happens as well as a chunk of profit going to the fulfilment house. They lose a product + they lose shipping costs + they may lose money to the fulfilment as a service (in some cases, not all). So one bad customer can cost them a real money. That has to be amortized over actual sales.
Clawing Back – Startup style
So could something competitive with the Garmin 520, Wahoo Bolt, or whatever is Polar’s thing (I’m an avoider until BLE pulls it’s pants up). Sure… but how? (using the $523.7 dollar version)
- Direct sales model ala Canyon. I think this could anger fewer people than a bike, but you seriously limit your ability logistically. Shipping into different countries is hard and a good distribution system will sort that out. That’s one of the things you’re paying for. So, if you can focus on one large and easy market then it’s okay, but keep in mind that if you accept orders to other countries be ready for “why did I just pay 150 euros / pounds / Australian dollars to get my device!” emails. A lot. I mean, about every single one.
- Savings = $256.5, new price = 267.2 but profit being eaten into logistics, so raise marketup to 80 – 100%. Gives 299 at the low end. Magic number
-
- Partner / HW reuse – So the Dragonboard 410c is the same hardware as my Moto E and using the Qualcomm radio it has ANT+ (but Motorola didn’t include it). If you literally negotiated the reuse of a board with an existing manufacturer.
- Savings = < 10 dollars on COGs. Suggest increase profit to 90%
-
- Surplus screen or screen from other product. This is going to mean going to Shenzhen in person to pull this off or amazing Google-fu. But maybe a savings of $20 here.
- Savings = 20. Suggest maintain the 299 price point for future sales. Profit increases to 120%. Now you have a chance of retaining some devs because they might even get paid. New risks though
-
- B/W Transflective screen
- Similar to above, just, you know… 1930’s but great contrast
-
- Invent some aspect that is unique and commands that higher price point. Blue Ocean it!
Hammerhead Karoo – Bu-ga-looooooooo (It rhymes I think)

Honestly, it looks a little big, but I don’t mind the large head units. If they can pull off a sub $400 dollar unit I’ll pre-order. Honestly, if they pulled off 299 maybe two (girlfriend still on an aging Edge 500). If 499 or more, nope. Sorry. However, based on my estimates I don’t know how they could pull off a price point where I’d hand over my money. It’s hard considering all the things that have been added to the edge series since they launched.
Sunday, December 18, 2016
Startup Market Analysis
Or how Keith explained what the Keith-rambolator is. Maybe Keith—Rambolator 6000. Like the 9000 but cheaper and software upgradable. (Dilbert TV Show joke)
If you’ve ever seen a business plan there are usually sections for market analysis. In high school, I received a great grade for a business plan because I used actual market data (Statscan) and basic analysis techniques – in retrospect I had no idea what I was talking about, but it sure looked good to the masses. So I am going to show how to use some “Trolled Data” to make my estimates.
So I like bicycles. However most people have no idea how big the market is for bicycles. I know of several shops that import Chinese frames and rims/ hubs – and they all swear by them. They may carve out a local niche and usually have to eat a frame or some wheels here or there but they stick with it because they luck out of a massive liability lawsuit over dangerous wheels. Wheels are expensive “free speed” – when a shop offers cheap “free speed” it’s tempting. Similar performance, no real R&D and no real liability control. One major injury and the shop shall cease to exist forever. They see a recurring local market that’s accessible and tempting – offer something cheaper that looks the same and people will buy. This is a more natural approach – “I think there is a market and turns out there is”. It’s the gut feeling that a small shop might put into a business plan where they support it with internal sales numbers of Zipp or HED wheels plus Chinese import pricing, etc etc. We aren’t here to debate Chinerello’s and Zip or HEAD Wheels.
Back to the other side of things where I’ve also seen several start-ups try to estimate markets and they do little better than a small bike shop. The reality is that startups are hard and require a lot of guts. When you’re blue ocean the sky’s the limit and the numbers are close to made up. When you’re red ocean it’s quite messy – every investor asks how the pitch guy knows the market.
But what if you need to know something simpler for your blue ocean tech. We use the terms TAM, SAM, and SOM to talk about market for all things. TAM is Total Available Market which is the total market. SAM is Serviceable Available Market or the portion of TAM that your market can reach. SOM or Serviceable Obtainable Market is the portion of SAM that you can reasonably capture. And this is our screeching halt.
You see SOM is that overly optimistic amount you share to investors. You have to estimate realistically how big this is and it’s hard. Blue Ocean tech means your SOM should be close to SAM because you have zero competitors. However, bike frames for instance, there are lots of competitors – each marketing, each adjusting prices, each offering bike shops a reason to buy their bike and sell it to you, the consumer.

From Don Hertzfeld “Rejected”
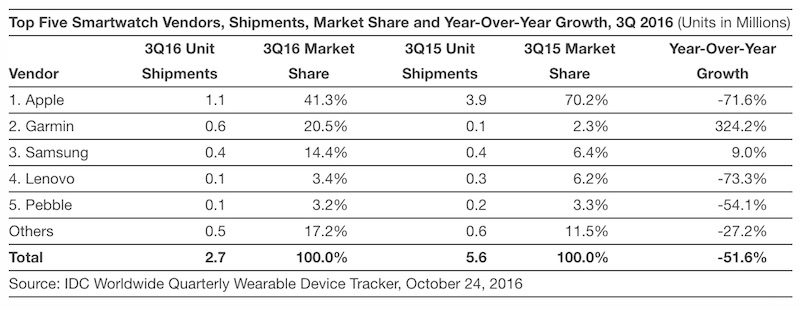
However, how do you come up with TAM / SAM. The way I’ve seen it done is usually the most non-scientific guesses. The slightly better way is what you’ll normally find inside a Mom and Pop business plan IF they are really good. It’s called “industry expert” and it is by no means accurate, but has to be infinitely better than nothing – kind of by mathematical definition. There are other ways, like IDC provided about smart watches but that gives us TAM and nothing else. This data is still usually an estimate or “trolled” from SEC filings or similar. There are very expensive reports on different industries that definitively state “The Market size for X is Y” and sometimes the only reason you spent 10000 dollars on it is because someone talked to three CEO’s and massaged some numbers.
So I’m going to walk you through the Keith Rambolator 6000 for high end road bikes. Lets assume I have a new sensor that I want to sell to cyclists. Lets say it’s not a powermeter, speed / cadence, heart rate, or any other sensor – it is, in fact, a new sensor that is unproven. Blue Ocean here. My prototypes work, I’m ready for production, and I am testing the market. So we’ll call this the Daedalus Device because it sounds ominous and I’m a huge nerd.
Lets say it’s only good for Road cyclists (I’m cheating, because this example has good data but this will work for other data). Lets also say that it’s for serious training – if you don’t have a training plan or are serious about competition than you likely won’t buy it.
TAM = Road cycling market? Or is it? In my mind it is not. However, in most Startup CEO’s minds yup. The reality is this is the start of massaging data to make things look amazing for pitching to investors. This is my problem – I can’t inflate sales estimates for a performance device, something in the vein of deep section rims, to the casual cyclist. It doesn’t work but that makes TAM much too small for pitch decks. So investors, be wary of the snake oil.
Recently I got a google alert over the Venge Vias recall. Don’t care about the problem and the finger pointing but it provides some cool data. Normally the approximate number of units is reported. In Canada 94 units from July ‘15 to Sept ‘16.

Given this is about 1 year and the population of Canada is roughly 1/10 that of the USA we can estimate that 900 – 1000 units of the Venge Vias was sold there. Why isn’t this an assumption? Well because I can prove it’s right from several reports (such as here) stating that the US recall is “about 1000 units”.
Assumption 1 – Europe has more population but more brand competition. Assume equal market size for twice the population of US (Medium Assumption)
Okay, now I’m making a leap of faith here. I have little basis for this except industry experience (AND NOT “expert opinion” because I’m not, and most people you meet, even CEO’s won’t be – actually mostly the CEO’s won’t be, but someone else in their company is).
Product Assumption 1 – it’s too painful and expensive to access the JP / Aus / Etc market (High Value Assumption)
This is generally legitimate for a North American startup. If it’s electronic you need FCC for US for both passive and active devices. Most places can handle the paperwork for Canada for an additional small fee and a Medium fee for EU. However, it gets a little harder with JP / AUS because most NA houses have less experience with them. Also, the more countries you sell too the more regulations, support, and shipping / logistical nightmares. Limit regions for your startup because really you’re testing the market, not selling a product.
So we can estimate the sales of the Venge Vias at about 2000 units a year (rounding down for Canada).
Assumption 2 – Venge Vias is top tier for Aero Road, so Specialized has Tarmac in top tier that should sell equally as well (Medium assumption)
It’s more likely that this is weak assumption. The Venge Vias is a 6000 – 12000k bike while Tarmac starts much lower at less than 3k. So this is likely conservative.
Assumption 3 – Industry tends to indicate that Ultegra sells about 5:1 over Dura-Ace (as a bike shop, it ranges) (Medium / Weak Assumption)
Okay, so two more assumptions lead us to Specialized selling 2000 Vias, 2000 Tarmac DA, and about 10000 Tarmac Ultegra. I’m going to cut in here about the Product assumption again. There are lower end units but we’re after SAM / TAM. If this becomes SAM then we can inflate for TAM, if this is TAM we could expand.
This is a medium to weak assumption meaning it might be less valid. Companies, especially the big bike companies, constantly look for ways to drive down price. That non matched crankset, it’s not performance, it’s to save a few dollars. No Brand Brakes – yup money savings. Commonly, off brand chains and lower grade cassettes. To me this is bad because they are hiding the cheap components that are harder to see (except the crank). The crank is one of the highest cost components so they have a market spin on this. EG: our house brand crank is better – usually not better, just cheaper. Sometimes better. This serves to do two things for the analysis. It means we’re being conservative, but it also means that while we’re being conservative, the people buying these versions of bikes that are cheaping out are not likely our market for the Daedalus Device.
ASS 4 – Tarmac coexists with Allez and Roubaix, Assume similar volumes as Tarmac Ultegra and NO DA level (Medium Assumption)
So market is up to 34000 units / year. This is probably a medium level assumption because of a few points. It’s the Ferrari theory. To drive a supercar to the edge you should be physically fit, reactive, good eyes, ability to handle vibration BUT the people who can afford these are usually older, fatter, and want comfort. So it’s likely they are more willing to buy Tarmac over Venge, but even more likely to buy Roubaix top level over a mid level Tarmac.
Confirmation Data from Trek Recall
In 2013 there was a Madone Brake Recall due to their in house designed brakes. Not all Madones were affected, but most of the higher end (5.2 and up) were affected. Well, looking at serial numbers affected show 14769 units. Which is about 1.5 times the estimated Tarmac alone (10k – 12k). This is pretty good confirmation because in Ass 5 (below) we use the revenue to pro-rate.
PA 2 – Customers who are Tech Savvy with sensors already / serious athletes. So most of the market is top two tiers
This is sort of a cheat, but I tended to see more people at mid tier (Ultegra and higher) have sensors and most below that without.
ASS 5 / PA 3 – From one, comes many. Lets say my market is mainly road but I need to know how the market grows from one company. Company size and other data
Okay, time to dig into some analysis here
Specialized had 300 employees in 2002 (wiki, unreliable, blah blah). Trek has 1800, but also manufactures stuff on site (Specialized is more Asia) so this might not be useful since a company that manufacters might have 3 – 5 labourers per engineer staff. Instead lets focus on revenue. Specialized sales est. is 600 million, Trek is 900 million. Giant is 1.8 billion, but heavily into manufacturing for other companies. Cervelo is 11 Million. All Wiki, all suspect.
According to NBDA (here) old sample data, there is a “Big three” of bikes: Trek, Specialized, and Giant.
ASS 6 – Giant is more manufacturing NOT sales, therefore Giant < Specialized, therefor assume equal.
So we know estimate that Trek sales of bikes, pro-rated against sales volume of Specialized and annual revenue means. Specialized = 34k, Trek = 51K, and Giant = 34k. Total market is 115k / year for SAM since this is realistically the actual market. It’s not necessarily true though. Depending on perspective as said above, this could actually be TAM (if you’re an engineer) or SAM (if you’re a a not so honest type all the way to greasy CEO type). It all depends. What is the TAM? Will you ever get this level of Assumption detail and explanation?
ASS 7 – SOM from Simon Sinek, “Well you can trip over 10% of the customers” rule. Watch this video.
You need to get the 2.5% early adopters to get the 13.5% to 18% early market in order to trip the system to catching on. So what should your first year SOM be? From an engineering perspective, 2.5% is right, 2nd year 15%. Why? If you can’t achieve the 2.5% in the first year with people who just “get it” then there is not point to fight for 3 or 4% UNLESS you got the market analysis wrong. You need to get the 2.5% so the 13.5% to 18% to see it in the hands of other people. However with hardware this is really hard. I’m not going to change the numbers, but just accept that year 1 might be year 2 or year 3 sales. This is where you can’t tell because you don’t know if the early adopters will “Get it” and pay for it.
So what are my numbers for my Daedalus Device.
3 (4?) TAM SAM SOM Models
ASS 8 – TAM is market including entry level components 105 level. 105 level sells more units than Ultegra but has less tech adoption. Assume 2 – 3 times volume.
So under assumption 8 we could get a conservative model using the 3 times ASS 6 as:
(1) AM = 400k Units, SAM = 115k units, SOM (year 1) = 3000 units, SOM (Year 2) = 17.25k units, SOM (Year 3, achieved tip in Year 3) = 57.5k units.
Weak ASS 9 – Mix wrong data. Lava Magazine Triathlon bike counts indicated Trek and Specialized are maybe 1/4 of the market.
However this goes in the face of the Revenue theory. In Triathlon, Cervelo is actually greater than Trek and Specialized combined for the bike counts. Their revenue is 1/6th of Specialized. But using this we can inflate the numbers by showing that The Big 3 are smaller. This paints a very different picture:
(2) TAM = 1.6 Million, SAM = 460k, SOM = 11.5k (y1), 70k (y2), 230k (y3).
Alternatively, and using NBDA industry overview data here, we could say directly a very simple model. This is what I’ve seen most in Pitch Decks:
(3) TAM = 17.4 Million, SAM = 20% (all road bikes), so 3.5 Million, and SOM = 5% meaning 174k.
A better estimate through the Keith-Rambolater – these are the instinctive guesses I’ve been called out for on my Apple Watch usage. TAM is only road but also the upper segment but also CAN/USA/EU. This data is US only so we’ll have to double?. Our SAM is the percentage of market here that buy high end equipment. So assuming an exponential curve for Top to Entry and cut at the Low Entry (We have to include this since we are extracting our data from ALL bikes) we can see that maybe 2.7% is in the SAM. Then we can do the same SOM analysis using the Simon Sinek idea of early adopters.

(4) TAM = 6.8 Million, SAM = 180k, SOM = 4.5k (y1), 27k (y2), 90k (y3). Wait a minute! The SAM and SOM numbers look a lot like our 8 Assumption model, though a bit higher. TAM is inflationary because we chose it to be since we were starting with ALL data.

If you haven’t guessed the use of the word “ASS” is a bit intentional by this point. There is a bit of a clear “one of these things is not like the other (maybe two). Keith Rambolator and 8 ASS are close and “8 inflated ASS” is similar, but the NBDA direct data outlies (this is a logarithmic graph so ever line is an order of magnitude). So Year One of Daedalus Device should be around 3 – 11.5k units. If it were to achieve this without significant marketing effort (Lean Startup) then we can say we’ve tested the market and we’re in a good position.
(Anti) Caveat 1 -- DONT EXTRAPOLATE DATA!!!!!!
If you’re an engineer, mathematician, scientist, etc you’ll probably remember someone yelling at you to not estimate outside of the dataset because you don’t know if the relationship you regressed holes true. The reason that Business Analysts get paid so much is because they risk their job on doing what I just did – if they get it wrong they need a new job, if they get it right, they keep their six digit paycheck. However, for the engineer in me it makes me cringe soooooo badly.
Caveat 2 – This actually underestimates (or overestimates?)
Based on some other knowledge I have, this is likely underestimated. Assumptions 2, 3 and 4 are likely the cause of this. Tarmac likely sells better than Venge Vias as the Vias is in a premium range (9k bike when some DA level bikes start around 4k) and I didn’t account for the non Vias Venge either. So this should allow a larger market size for TAM and SAM. Fixing 2 should go a long way to fixing estimates. I don’t have enough data to figure out sales volume of Allez and Roubaix. It’s hard to know as Roubaix has moved upmarket.
Assumption 6 could be better refined. For instance if we could estimate better the road volume segment of Trek and Specialized or add in other large brands.
So what now?
Go, live your life. Know that I am not an expert in anything but know that there are multiple ways to do anything. Aggregate data is your friend though. If you solve a problem 10 ways and 9 of them line up then you know which one is wrong (usually, something about a type 2 error in stats).
This is my problem with comparison. If you have two devices or models of things that are similar you CAN NEVER assume one is right and the other is wrong unless you have some evidence to support. I created 3 – 4 models here and 2 – 3 lined up. One (the most commonly used) was at least one order of magnitude larger. Likely the true numbers probably between the lower 3 models. However, all are based on similar assumptions and each assumption could have wrecked the lower models.
Everything, except the NBDA model, used a simple Product Assumption – it’ll take a year to get your early adopters before you can access your early market and mass market. This is more about what you promise your investors. In Blue Ocean you could in theory access all of SAM but in reality you can’t or won’t. Someone will come behind you. Like Apple came behind HTC with touch phones, and then android came behind Apple’s more refined iOS / iPhone.
In red ocean there is a different approach. Like building a product that already exists – weather it’s to create a new feature or improve the price. Your TAM and SAM might be similar, but you need a different method to determine SOM.
Monday, November 28, 2016
Why hasn’t ANT+ been crushed by BLE

Recently (okay, like weeks ago) I was asked why hasn’t ANT+ been completely crushed by BLE. Normally I’m asked “which should we support” which I have a better answer for – both. The short is BLE could, but several it seems that around every corner companies fumble it. OVER and OVER and OVER. I asked an industry expert and the world and got some new responses, but mostly the same. The same is BLE is a mess. It’s revising without adoption (4.3, 4.2, 4.1, 4.0).Users don’t understand the sensors can only talk to ONE device. The new one was because…. Polar. I’ll get to that near the end.
History lesson time. Before BLE and ANT+ there was a mess. Proprietary protocols, no standards, analog sensors, or secret standards. If you want to see backlash on standards look at the Ray Maker Kurt Kinetic Smart trainer preview and read the comments. Yes I did a piece here as well.
It was inevitable that someone would step forward and create a simple 2.4GHz protocol to unify things. The group that did found themselves in the right place at the right time with the right technology. It was enough of an innovation to attract the attention of Garmin to purchase the company / protocol – and thus ANT+ was in the hands of a corporation to be locked down and….. Wait, none of that happened. In fact the life blood of the sales of Garmin is other people’s sensors. Look at the mass of sensors in a Garmin. There are 14 (really 12) sensor types in my 520. 3 are proprietary – except that two will become ANT+ standards based on those two Garmin exclusive products thus opening the floor for competition. The last is Shimano shifting -- there is a generic and open shift profile used by SRAM and Campagnolo so that doesn’t even matter anymore.
Smart phones had Bluetooth, with it’s 20 – 40 ma draw. It allowed you to talk hands free to your car and then allowed for terrible BT audio, and then after people complained, decent BT audio. It allowed keyboards and mice and a huge number of other devices to work wirelessly without too much problem. Just remember the pairing code is either 1234 or 0000. But even 20ma was too much for sensors and most companies, The power consumption was too high for a coin cell. Other motivations and some time meant BLE emerged. Or Bluetooth low energy. It was remarkably similar in some ways to ANT+ and yet functioned completely different – but it was really for phones.
So how did we get to this BLE mess of “the next version will crush it”. The iPhone emerged and was, as far as I recall, the first device to have BLE in iPhone 4 (or was it 4s?).Then the overwhelming adoption of Android (complete with flaky BLE that still has teething pains in the splintered Android ecosystem) two things have happened. Now every Mac has BLE and standard iPhone like coding API and Windows is such a mess that if software supports BLE, sometimes it’s only on one type of USB BLE adapter (Shout out to Trainerroad for trying with the Bluegiga BLED112). So Apple leads with the phone for all – except every few iOS versions they take more BLE functionality under it’s control and breaks apps.
ANT+ had been around for years unifying powermeters, heartrate monitors, foot pods, speed, cadence, combined spd/cad and other less known sensors. But guess what. The big money maker for BLE is not sports. And this is where BLE could have killed ANT+ but didn’t because it fumbled. It didn’t write good specs. It’s licencing and certification fees were so high most companies just didn’t implement it correctly or pay them. When they didn’t pay them they couldn’t participate. ANT+ on the other had – well, most middle income americans could afford membership and certification by going without a new TV or the latest macbook. Those same people would have to go without there base model Tesla model S base model to do the same with BT. This has gotten better, but it’s still an order of magnitude greater so still most people ignore it. So people don’t have a simple unified way to check their products in the BLE space.
Around the time BLE was emerging there was one company in the sports world that didn’t adopt ANT+. Polar. Polar had been the king of making watches and heart rate monitors for a long time. It was so common that gym’s used some of the variants of it’s technology and it’s still in use today. There are still heart rate monitors that use Polar’s very old analog low frequency (khz) transmitter. Some gym’s and clubs use them now. However, when things unified under ANT+ they said no. I don’t know why but in hindsight, if they knew how it would hurt their company, I doubt they would have done this. The last few years this has caused so many headaches. A quick search for Polar protocol reveals W.I.N.D, 9khz, 5khz (the actual one), “ownlink”, BLE, Nike proprietary partnership (for Nike Run watches), and then I quit. Polar started talking about BLE before 2010 according to blogs and forum posts. When I used the Polar V800 in 2015 it still did not support any BLE powermeter correctly that wasn’t the Polar Look Pedals. In fact, adoption was so poor with those pedals that you can now get ANT+ pods for them. They were the well engineered powermeter pedal option nobody bought. They worked like no other powermeter – dual BLE connections. Each pedal acted like a single sided unit and the watch put things together. If only one was connected, it doubled it. NONE of this is in the BLE spec. There is an identification bit, but it never describes how it is to be used – AND even in the 1.1 doc it still doesn’t clarify this when I checked. The ANT+ Power device protocol is on version 4.2 which was specifically reved to clarify how to deal with setting crank length. It’s backwards compatibility maintained with most devices – a handful MIGHT have problems, but not many and there are work around.
So we have ANT+, unified, backwards compatibility, cheap to implement, free software suite to ensure compatibility, cheap certification, and highly functional with easy implementation – with one trade off: data security.
We have BLE with fractured certification, inability to financially participate (initially), poor implementation, a fractured phone ecosystem, and Polar and Sunnto (who left ANT+ after Ambit 2 for BLE) who are still having problems getting peoples sensors to pair and work with their devices.
Special officer Doofy reporting for assignment “Crush ANT+.
So where are we today?
ANT+ has had a big uptick for several reasons. Looking at sales of watches, Garmin had a 300% sales increase year over year after the Apple watch due to probably 1) more exposure and 2) people realize the Apple watch was terrible for sports, a really dumb expensive joke, and realized that the Garmin's were trying to be smart watches -- plus Garmin aligned products, created ConnectIQ. And finalizing the FE-C stuff for trainers has been a major boost to Garmin sales, trainer sales, and software subscriptions -- all heavily ANT+ with BLE supplementing for phone communications.
So why hasn't BLE crushed ANT+ with a wild fiery vengeance. Apple / Samsung / HTC / LG are playing a volumes game. Apple doesn't sell 1 million iphones and call it a success anymore, they need to sell about 40 - 50 million a year. A good year is 75 million. Their apple watch has had 12 million sales in 2015 and a 55% drop in 2016 (pre Watch2). Lets say 18 million for a good measure. A good Garmin year is aggregated 400k (guess based on IDC data) watches with last year but hit 600k in a single quarter. So looking at 3Q16 Apple shipped 1.1 Million while Garmin shipped 600k devices. Garmin’s likely have high usage, probably 80 - 90%. While apple watches slid (Several news sites, Forbes, engadget, WSJ, etc + Keith-o-algo, rumourmill, grain of salt) that only 30 - 50% of Apple watch wear them, let alone use them for much. So say a 6 - 9 million apple watches, 1 million people using them, some smaller, say 10%, using them for sports = 600k - 900k sports users over 2 years. Garmin hit that for a user base in a single quarter.
With all the BLE regulation, fee's, inability to meet, no idea who actually creates things, people find it easier to just do their own thing. People say “I’ll help who ever implement my proprietary protocol”. NOPE. It takes the same effort to write a protocol as to help one client implement. However, if the client is implementing a standard there are references and samples so the time to implement is quick with less testing. Working one on one means they could implement 3 – 4 standards in the same time to implement one buggy proprietary incomplete standard – that the company will evolve. NOPE. And the inevitable feature creep. The “we have a new api, please implement” followed by “really, that wasn’t on our timeline, we can look at implementing it in 6 – 9 months” followed up with it breaking app compatibility when hardware players roll out that update.
The short is, interoperable -- ANT+ still wins at being friendlier to not creating a silo product and a silo product = death now. So with the 40 - 70 million unit companies not caring about BLE for sports sensors (or looking at it as IOT type devices and not understanding people want THEIR OWN data), sports is an afterthought with a constantly changing specification that isn't really backwards compatible causing older devices to have connection issues and with bad API's for the foreseeable future until Google and Apple handle all of that, ANT+ is just simpler and has a better test market of people who actually use their devices.
Anyway. BLE could win if they'd stop running around with their pants down around their ankles but nobody seems to be trying just yelling “ANT+ will die with BLE version 4.x”. Soon to be version 5.x, then 6.x. All the while ANT+ is collecting 8 cents on every ANT+ device in the world (nRF52 royalty. No idea on nRF51, it’s baked into the Nordic chip price).
Tuesday, October 25, 2016
How hard is it to make a cleat based Powermeter?
I woke up this morning and I saw that Brim Brothers had quit. I’m sure if I had ever met Barry Redmond I’d likely be asking the question that probably kept him and his team working so hard.
“How do you know the crank angle, or the appropriate relative angle between pedal and crankset?”
So if you want the short answer – It’s hard! It’s VERY VERY VERY hard.
I predicted this was going to be a nearly impossible problem with inertial sensors and I hate that I was right (Or wrong, you’ll see at the end – no comfort for Pre-order people, but the tech is out there). I had played with inertial sensors in University while working on active vehicle suspension design for automotive. And I said things like “I’ll just double integrate acceleration to get position” to which my Masters supervisor said “Doesn’t work” and I marched on my way to find that no matter what I did position drifted and accelerated away in under 2 seconds. The accelerometer was taped down to a heavy old wooden table and the math said it was flying away at 1000m/s. You have two options then; believe that I invented a new form of transport… or accept that the math didn’t work.
So below is a picture that will take a couple of paragraphs to explain, but the short is Brim Brothers measured force on the cleat in two directions (purple) and could be resolved into a single force and direction (red), but not all this force made torque (green, perpendicular to the crank). There are two angles relative to the world (the reference frame I’m using).
A really good inertial algorithm using accelerometers and gyro’s and any other MEM’s could figure out the angle of the shoe (theat_shoe). Those two things only tell us the vertical component and the horizontal in the “world” reference frame. Without knowing the crank angle very precisely you have no idea what torque is. We know the force and direction relative to the shoe and we can convert that to the world, but not the crank reference frame.

In fact, if we leave all the forces the exact same and only change the crank angle the resulting torque is different and reversed. This isn’t even unrealistic as the “lazy leg” has to be lifted by the other. Try cycling with one leg and see how tiring it is (those with Power Cranks are exempt).

We have zero different information (not really, but I’m getting to that). Accelerometers on the shoe state this is the position and angle using a simple algorithm. Let’s ignore time history integration for a second and only look at data which can determine reliably orientation in 3D space. The shoe angle is known, the force vector is known, but we know nothing about the relative orientation against the crank.
So basic inertial is useless because we can’t resolve torque, so that means two things
1) The Luck shoe is 1/100th where the Brim Brothers were years ago and only senses in one direction therefore it can never accurately get power. Some sort of half baked tuned version
2) Brim Brothers were into some very advanced predictive methods to predict and calculate crank angle
Ignoring point one, lets say we can integrate the velocity. Keep in mind we are moving outside and we can only figure out velocity relative to the world (this is how accelerometers work, the reference is the world with gravity vector being “down”). So we know the velocity which is a circle except when we move forward. Then the velocity profile is more of a spirograph. So from this we can figure out just about where we are in the crank rotation as velocity should be tangent to the crank + some averaged forward velocity + some drift. So assuming the filtering cleans up the drift and we can remove the forward velocity component we now have a vector that tells us crank position.
EXCEPT – well, it’s an estimate of crank position. It’s not necessarily true crank position, and it’s a weak filter since we never directly measure truth. So now we must supplement it some how. We can use the cyclic nature of the accelerometer going up and down and that helps stabilize the reference. OR we can use this to find the top and bottom of the pedal stroke, calculate cadence and use that estimate crank position allowing you to calculate torque.
Except if you change how your feet are angled like getting out of the saddle could change expected orientation, or small vibrations, or a speed bump, or even angle change due to starting to ride up a hill.
This is only one example of the problems associated with all this inertial sensor stuff. I don’t really know for certain what was the real problem, but my speculation puts it in the inertial algorithm area. Any time with a powermeter you have to make a guess like estimate an angle, or estimate a position, the answer is wrong. There hasn’t been a powermeter that works reliability that has an algorithm beyond a rotation measurement and been proven accurate yet. That doesn’t mean their won’t be, but when a company uses the words algorithm in terms of power sensing be wary. My suggestion is to avoid anyone who says algorithm too much until you can test their product.
However, I also read today about something that is using inertial sensing to figure out position, orientation, velocity, and acceleration… cheaply ($1500 USD for 32 points). It’s a full body motion capture suit (NOITOM) and it is amazing. It’s been used on a lot of videos. Normally motion capture is IR camera’s and reflective balls with a lot of software. This is just inertial, calibrated to positions, and some amazing filtering algorithm. I’m not sure it would be accurate or fast enough for what the Brim Brothers needed, nor know if it would give enough to back out crank angles without multiple placements, but it’s amazing to see a company able to put together a system that must have a build cost of only 500 – 700 dollars so they can sell for $1500 for the 32 node version. Check it out. It’s this tech which could enable a successor.

Friday, September 9, 2016
The case of protocols–Kinetic and ANT+/BLE
It has been a long time since I’ve posted, but I wanted to chime in on something that affects me more as a consumer than a developer. It’s the recent choice by Kurt Kinetic to continue to avoid ANT+ and the standard BLE profiles.
I’ve recently read the Simon Sinek book “Start with Why” and I’ve watched the Ted talk (here) numerous times annually as a reminder. Having worked with a startup and poured my heart and soul, and not to mention 60 – 80 hours a week for over two years, I feel that I’m a little in touch with the why I do things. The why for me is connected with my what – as in my personal history. Motivation to make a cheaper powermeter extends from being poor and being fat, and changing that with smart purchases. One of my first smart purchases was the Kurt Kinetic Road Machine.



I wanted a trainer for my used road bike. My choices were Cyclops, 1up, or Kurt Kinetic at the time and these were all big purchases for a poor Masters student. As a person of engineering I researched and researched and researched. What I came up with was that over long periods of use (think years, like 5+ years) the Cycleops may leak. The 1UP, while well reviewed looked cheap and dated. Then Kurt Kinetic, new in the world of trainers, only one product, a little louder than the competition, had a trainer that was guaranteed not to leak. And boy was the technology amazing. It couldn’t leak! EVER! I was amazed. So I bought it, and I stayed home all morning waiting as long as I could for the UPS guy to show up… only to find that he just left it outside on a busy street. Mixed emotions that day.
![[DSC_89214.jpg]](http://lh3.googleusercontent.com/-FGpqjXJ_kHk/UDrFV-CO1II/AAAAAAAABb8/B4d-24n5k18/s1600/DSC_89214.jpg)
Not only this, but there was a power curve. I had just heard about training with power and I was intrigued. I built up a little Arduino platform, wrote some software that pre-dated TrainerRoad and Zwift by years that allowed me to follow my workouts from the Andy Coggan / Hunter Allen book “Training and Racing with a Powermeter”. I trained to this power curve using my own software for 2 years. Over this time I migrated to using the ANT+ Speed / Cadence sensor instead of the Arduino. Then I got a Quarq Cinqo Saturn and adapted the software to use the ANT+ power profile. But the power curve of the Road Machine was in the software still and I tested it against the power meter and I was happy with the results from Kurt Kinetic for all those years. The ANT+ profile was so easy to implement. It could be done in a day!
![[DSC_9595%255B4%255D.jpg]](http://lh3.googleusercontent.com/-sRfaeTEFX10/UgrPeDrDD_I/AAAAAAAACcc/vRY7ajnP1VA/s1600/DSC_9595%25255B4%25255D.jpg)
If you go through my photos on this blog you’ll see my trainer in the background in a lot of them. It doesn’t matter what I’m working on, the Kurt Kinetic Road Machine is always there. It was my rock. It was a powermeter test device. It was a calibration stand. I even got a dial gage and magnetic base and it became an AMAZING truing stand saving me hundreds of dollars.
Over the years Kurt Kinetic grew and I was excited. I was also loyal. They came out with the rock and roll and I loved the idea (but couldn’t afford it). They believed in a reliable trainer that never leaked and innovation! That was their why. They had a cycle computer that had a regressed power curve, like I was doing, but it couldn’t log data and was expensive. I forgave this because I believed in the why of Kurt Kinetic. I would say “They make good hardware. Bad electronics from a probably Chinese outfit can be forgiven”.

Then Kurt Kinetic replaced the bad cycle computer with a little pod. I was excited until I found out that it was only BLE. My Cell phone didn’t have BLE (Samsung Galaxy S). I have a background in mechanical simulation so I don’t use a Mac because there is no Solidworks or ANSYS or ABAQUS or CATIA or Unigraphics or PRO-E or Altium or ORCAD or.. well you get the idea. I make things, and to make things with professional software I use Windows. Windows had almost no good Bluetooth support then, let alone BLE. I figured I’d forgive this transgression because “Kinetic” (dropping the Kurt) does awesome hardware. This module is probably outsourced. It’s not part of their “why” as a company. It’s just to fill a gap to try and catch up with Wahoo. Or maybe they believe in BLE only – not a large sin, but still a sin in my eyes.
Enter Smart trainers. I didn’t like the original Wahoo Kickr. Maybe it was early firmware, maybe it was that the cassette didn’t align properly to my wheel and I’d have to constantly adjust the rear derailleur between riding indoors or outdoors. Maybe it was that it never appealed to my price conscientious history – again, being very poor growing up means that high profit margins can put a very foul taste in my mouth. Gouging customers is akin to murder with me. Charging over an MSRP for instance should be met with the end of the Rick and Morty episode re-enacting “The Purge”.
So I brush it off. Smart trainers aren’t (at the time) my thing. They aren’t even close to accurate to a real powermeter at the time. Software control of the trainers was non-existent and slow and BAD. I also thought there cannot be a market for this 1800 CAD product (Bad exchange rate at one time). However, the market grew and smart trainers were a thing. Wahoo had invented an all new product, and after some teething pains, they got it right. Early adopters through to creating a market. Congrats to Wahoo. Awesome work. Now for the bicycle paddle boat that Chip wants to make.
So now I’m thinking about how most things work so nice together over the years because I got into the right ecosystem. I had a Garmin FR60, replaced with FR910xt and an Edge 500 replaced with 520. I have Trek Bikes with built in Speed/Cadence sensors. I have a HRM from Garmin and one from 4iiii’s. I have numerous pieces of software, all working with an ANT+ USB stick perfectly, reliably, without fail. Multiple devices can receive and transmit. It’s a wonderful ecosystem – now owned by Garmin. However, they try VERY hard every year at the symposium to say “guys, if you have ideas we’ll help you write a whole profile, just work with us!”. They invented Connect IQ as a way to accelerate this! They allow for Private manufacturer pages to be reserved and tested openly with Connect IQ. Garmin wants peripherals! What they probably don’t want is watch and head unit competition – but that’s another story. The only reason I see to not support ANT+ is because you are going to make a BLE only head unit.
Which brings me to Polar. Polar right now is where Nokia was when smart phones were invented (or maybe a few years after). If they survive I’ll be impressed, and if they do, their only saviour is the iPhone and later Android, by latching on (poorly) to the BLE profile and still trying to act superior. I don’t know the story well, so I won’t speculate too much, but it did lead me into an interesting problem.I’ve used the $500 CAD Polar V800. It’s a joke compared to the FR920xt or the new FR735xt. I’d pay 100 – 150 CAD for it personally. Same goes for the Sunnto Ambit 3. So disappointed in these. In a few years they may get their act together and maybe (doubtful) Apple will help out people with the power profile and push the implementation. To Apple, who really is the push for BLE, the dedicated sports market is a small market. Their money comes from the every person who wants to “feel different” and is willing to pay.
Now we can segway into how this affected me and my girlfriend. My girlfriend has a Nike runwatch made by TomTom. It uses the Nike proprietary footpod and a Polar proprietary HRM. While I had spare ANT+ and BLE HRM’s nothing would work with the watch except the nearly $100 CAD Nike specific Polar HRM. She wanted heart rate data while running, but baring multiple devices she couldn’t. She wanted Strava data from here watch, but had to use numerous websites to upload here data or also capture to her very large phone. She couldn’t merge the HRM data with the Nike data from a non-GPS watch. It was bad. Everything was just harder. Initially the BLE was flaky too due to poor implementation in most apps. In fact it was so frustrating as Nike updated their site, removing a lot of features, that she pretty much gave up on Nike altogether. Nike and Polar had blocked her from her own data. So now what?
We got a used FR910XT for her cheap and the Nike watch we don’t know where it is. It was cheaper than buying more proprietary stuff. It uses the FIT format and ANT+ and even though it’s older, it’s way more capable than other newer products I’ve used.
So let’s look at the pro’s and cons of Implement ANT+ / BLE.
| Pro | Cons |
| Instant compatibility with software | 0.25 USD Licence Fee for nRF52 |
| Ability to support new profiles quickly | May have to switch from nRF51822 to 51422 and increase cost |
| Felt as part of an ecosystem, can implement new features and roll them out to others as part of the working group | Develop BLE support or migrate existing proprietary takes time and money |
| Can use Connect IQ on Garmin products for apps and widgets | Develop ANT+ Transmit / Receive takes development effort, again time and money |
| Increased industry contacts and exposure via working groups | Risk competitors finding out your ideas |
| Existing profiles can be quick to implement with reference code | Could be major costs on changing IC – restocking fee’s to lost reels = up to 10000 dollars USD |
And now the Pro’s and Con’s of proprietary
| Pro | Cons |
| Build an Ecosystem | Single company implementation is same effort as multiple |
| Control of development of new features | Slower implementation by 3rd Parties |
| Control Power consumption | Deploying features could break others API implementation, meaning a lot of support, and risk of it being dropped |
| Deploy features faster | Risk a 3rd Party API replacing yours causing incompatibility (See Wahoo BLE API) |
| Risk of loss of market share to competitors | |
| Risk of loss of investors (If any) due to incompatibility (testing by investors) or failure to meet sales objectives of new products |
I’ve heard that Kinetic will try and explain it’s position, and I welcome them to doing this. Maybe I have missed something in my several years working with the ANT+ and BLE protocols. I also know that working with a single company with something proprietary is harder than a standard for 10 companies. The biggest thing it comes down to is normally feeling like you’re in the Garmin sandbox. Frankly, that’s why people are doing ANT+ and BLE. For choice. Implementing ANT+ gives you access to a whole new Connect IQ platform. Companies like Stryd have used it to implement power recording in run modes – Genius!. Companies like Specialized have used the Apps mode for their MTB demo about a year ago. It could have been done on a smart phone but I don’t know many people who ride a MTB with a smart phone strapped to it. Could Stryd have “worked with Garmin” prior to Connect IQ to implement this – yes and no. Yes because they want to implement a new product. However, implementing power on a non-power watch could turn a run only watch to a tri-watch competitor, so Garmin may have said NO. By taking that risk you could say Garmin could damage their own sales, but for ever sale they damage they probably grew 2+ because of Stryd.
Unless you have a lot of developers it’s going to be harder to do anything on power consumption and getting companies to implement a new feature and recompile and re-release an app is time consuming. And if your new feature you’re pushing to market hasn’t been tested and vetted you risk breaking someone else's software. That makes people less ambitious to update API usage.
There is a smaller development cost to implement existing compared to re-inventing the wheel, a small cost on the chips if thought out from the beginning, and a lot of positive PR. However, if the choice was made and the chips aren’t ANT+ compatible then it could mean a major design change. However, if they use the nRF51xxx series that means they can drop in the ANT+ compatible chip and swap the stack. They likely haven’t purchased more than a reel of IC’s and that could have run them 10k USD. However, that is the lost sales of maybe < 50 trainers profit margins? How many sales would (or have lost) by not supporting it from the start?
I just read all the comments on Ray’s post. Joel from Kinetic is trying so hard to be diplomatic which must be so hard. They have an internal decision that see’s him being beat up on. Not only that, but personally I’m saddened. The Road Machine allowed me to train effectively with power before my powermeter journey. I made my own ANT+ transmitter for it. I tested it’s power curves. I’ve shown my girlfriend how to use her Power Meter with it, and do an FTP test, and ride with TrainerRoad. I watched a new market come to light and I would stand by my Road Machine saying it’s awesome and doesn’t need to be stupidly plugged in. That it was solid with my 100kg putting out a 1200 watt 10 second sprint when I cinched down the tire. I don’t personally stand by their decision and I’ll eventually vote with my dollar. A few months ago I thought my Road Machines bearings were going – I still haven’t confirmed it. They suggested an RMA and I felt a little bad. It’s 6 years old now. It’s seen hundreds of hours. However, I had to pack it up and figured maybe I’ll just buy something new. After today I don’t believe in the why of Kinetic any more. I’m sorry and saddened. They lost their way. They lost their why. I know what it’s like to see a company lose it’s why. It hurts so much.
I’ve seen these type of decisions made because companies want an “ecosystem” but then they don’t realize that it doesn’t matter. It’s ambitious and unless it’s your only focus then you’re developing nothing. If something is a published standard that means there is a way to test and check that it works. If you have to send an API, hold someone's hand walking through it to implement while they are also implementing a standard, then who will get integrated first? It’s cheaper emotionally and time wise to a consumer to buy a whole new trainer than to wait for someone else’s product to be compatible. You’ll never be first to be incorporated into software, you’ll always be last. You don’t get to do what everyone did last year – show off Zwift or whatever new software is being shown in every trainer booth at Eurobike, but you get to do it later after it’s no longer novel. You get to be the last guy to show up to the party, but nobody is waiting for you because they are already starting to leave.
I don’t know what the reason behind avoiding FE-C, Power, Speed, and Cadence on ANT+ or why they are using their own proprietary BLE spec. I mean the ANT+ working group got beat up a lot for “holding back FE-C” but it’s now the unifying body. The problem is that these are standards that are already fighting it out. And as much as I hate to say it, ANT+ may lose. It’s easier to implement, quicker to get right, cheaper to get certified, but BLE is in every cell phone now. However writing your own proprietary characteristics for BLE and not publishing them means you are the third guy – the guy that’s forgotten about before anything starts. The Nokia, the Polar, and the Kinetic?
If Kinetic jumped, listened to the hundreds of thousands of dollars customers are saying they won’t spend, and say “We hear you” – then I’d consider them when I buy a smart trainer in a few months. You were already late to the smart trainer party being hosted by Wahoo and attended by Elite and Tacx with special guests Zwift, TrainerRoad, Training Peaks, Strava and more. Having your own party down the road the next morning isn’t going to be as fun.
BUT
Kinetic has a great opportunity here. There is no unified FE-C equivalent for BLE. What if Kinetic steps up and says “We might only do BLE, but we are going to lead Bluetooth SIG to making a profile because the industry needs it! We are going to reach out to TACX and Wahoo and get us all on the same page”. Without ANT+ I still don’t think I’d buy, but they would have found their why again.
Wednesday, September 10, 2014
4iiii’s Powermeter Promo Code + Story time
It’s been about 10 months since my last post about the powermeter development. Those who have emailed me have been stone walled about it, getting a response such as “I can’t talk about what I am working on in my new job”. The answer is that part of it was in fact a powermeter. So, to the loyal followers (and even the not so loyal) we are offering a discount promo code of Acuity for a 20% discount on all 4iiii’s products as a thank you for supporting me and following! Oh, here’s the “catch”. It’ll be the most accurate, lowest cost and user installed (no new crank needed for most riders!). And now I do what I love full time. So thank you!
UPDATE: Code was valid until midnight of Sept 12. The last day of interbike. Thank you all that participated.
Now, if you’re still reading but want to hear how this came to pass, I give you the long story
During my Masters degree I had used strain gauges. I needed a tiny load cell to test active suspension. It worked but wasn’t great. I decided to take these “student strain gauges” for a side project. My FSA vero crank, instrumented like almost all crank based meters, showed some results, but it was noisy, drifting, and unusable. After much experimentation I found that cheap off the shelf electronics were not cutting it. I shelved the idea and started working on some training software for use with the regressed power curve of my Kurt Kinetic. That was 2009 – 2011.
In the meantime a friend of mine in Waterloo was doing a Masters with someone at Babcock and Wilcox, the nuclear steam generator company, and passed off my resume. Five interviews, a security background check, and relocating my life from St. John’s, NL to Cambridge, Ontario I was now working in Nuclear Engineering. Most of my work was Finite Element Analysis, or FEA. Essentially I my intuitive understanding of how mechanics, stress, strain, deformation, etc work was being put to work for steam generators. I had been using FEA since the second year of my undergrad and at that point had used FEA on and off for almost six years. I even wrote a free book on using Ansys and FEA to design race car chassis' (link here).
It wasn’t long before a customer concern required experimental work measuring strain. Prior work was inconclusive. I heard the design manager going cube to cube in cube-ville (which was my home) and I ran after him (coffee in hand) and said I know a and used strain gauges, Eventually I disclosed my electronic hacking which had been featured on Hackaday and I was chosen as the ideal candidate.
However, I needed credentials. Everyone knows most engineers never touch things with their hands, but in order to do strain gauges I would. I’d add it to my machining and welding skills. So I was sent to a strain gauge course. After the courseof training later I knew exactly how to fix my vero crank powermeter! I was excited beyond belief. The problems I had seen were so minor!
For the next year I spent most of my time conducting experiments at B&W using strain gauges to great customer satisfaction. Between my FEA, electronics, and attention to detail combined with my knowledge of Design of Experiments and higher level statistics my work was deemed impeccable in execution. I was achieving 1% error with theoretical. A former Pratt and Whitney employee now at B&W stated his work was up to 15% error. I was so proud to be executing things at such an accurate level. In the mean time I had spent thousands of dollars and countless hours building up my own circuit boards and instrumenting cranks.
Vero, which was never self contained, was V1. Later a C-channel shaped SRAM Rival was V2. It was arduino pro micro based with an AP1 ANT+ stick from sparkfun and some analog components that weren’t suitable. V3 combined those onto a Rival OCT (hollow forged) crankset. However there was issues, clearances, etc. I had tried some different ideas and realized forces on a crank aren’t as simple as the industry thinks (or markets). However, I got my powermeter on the famed Hackaday and tens of thousands of visits to my little blog later I felt I was on to something.
So for V4, I moved to a lot of new components and a small custom board. I spent countless hours pouring over datasheets to chose the components. I built both a Rival OCT and Carbon S900 / Quarq unit. Both worked well. Very well. In fact I was on the verge of building up a bunch and starting to beta test. I had a listing of people who were interested from all over the world.
I got an email from the father of a lady who works at 4iiii’s. He was so interested in my work and has remained a strong believer of me. Eventually it seemed to fall to the wayside of the people there or was being evaluated at a slower pace than I wanted. However I liked this company. The founder had built Dynastream, the creator of ANT+. I was impressed. So I eventually sent him a message on Linked In.
A few super early morning calls later and I was using my barely touched vacation time to impromptu fly to Alberta to meet this guy and his team with my bike in tow. I had no idea what to expect. A short drive from Calgary to Cochrane later and I find a small building labeled the 4iiii Innovation Centre.
I had mucked around adjusting code on the carbon crank for more accuracy and messed up some math, so eventually I swapped in my Rival the night before. The battery kept disconnecting during the demo in his office but he was convinced.
Some interviewing and a discussion later on what he wanted to bring to market and I was confused, full of reservations but generally sold. He wanted user installable. He didn’t want into the crank buying, installing, selling market. He wanted to let people have choice. He wanted to drop the price and change the game.
I spent most of the next 6 months working on the basics. Can it be done? What material? What gauges? etc. What I found was that 2% bending error was not actually achievable on a crank arm with the generally accepted setup (a bending bridge). If you narrow your scope to a fine window it does but that didn’t sit well, but if you start introducing some cases that fall to the edge of the norm just a tiny bit (and encountered regularly in mountain biking) you’ll find that it’s closer to +/- 7% to +/-9% on torque accuracy depending on the setup. Let alone rotational accuracy from an accelerometer algorithm.
I’m 4 months in, looking at these numbers thinking I’m a not going to be able to pull it off - not with the accuracy everyone is claiming! I quietly start looking for a solution. How do I make this better. I’ve figured out the fundamental issues with user install but how do meet the accuracy. It doesn’t change from user install to pro installed. I tried angling the sensors, adjusting things, compensating for the non-symmetric cross section of the crank. Nothing!
Then I tried something else. What about adding a second setup! Something that can sense torque but that is very different from the first. Then, using my Design of experiments mythology and statistics I figured out that there is a super cool correlation. I was blown away! This was big, this was the answer to my hopes to get me that 2%. Not only that, but generally gave 0.5% error! This idea is so revolutionary that we put patent pending in place on this technology, among many other things.
We needed to package it, and admittedly the packaging isn’t perfect for the drive side and the last few years we’ve seen a mess in bottom brackets and now we’re seeing a mess on the chain ring bolt patterns causing incompatibility of some manufacturers cranks. This is sad. However I’m glad to say the last 3 generations of Shimano 105 (5600, 5700, 5800) work, Ultegra (6600, 6700, 6800 {this is actually epoxied together!]), and Dura-Ace (7800, 7900, 9000) all work. The latest Deore XT works for the Shimano MTB front. The 10 Speed SRAM Rival OCT works (my original workhorse on the prototype front) and the X9 looks good. FSA Energy is good too but their new 5 bolt asymmetric and SRAM’s 11 speed put bolts where we want the sensor. We are still searching for a solution. On the Carbon front the SRAM S900 works but we haven’t finalized our testing. We will be recommending using the calibration load cell that comes with the kit every year at least to check calibrations depending on crank arm.
Right now the product works, but in my bosses opinion is huge physically, so there will be a shrink in size and weight when we ship in a few months. This will also improve install-ability and compatibility as well as easing access to the battery.
However, one of the coolest things I’ve done which I hope to open to the public is my test data on the existing meters. It turns out it my original bending only design was better than existing solutions but was still +/-7% while the best off the shelf solution once we hacked into it’s sensor produced +/- 9% when we introduces pedal offsets.
Enjoy the promo code while it lasts. It’s our gift to you guys who believed in me on a personal level and going forward believing that we change the face of power for serious athletes at all financial levels.
*gage is generally considered the American spelling and gauge the British form.
UPDATE: Code was valid until midnight of Sept 12. The last day of interbike. Thank you all that participated.
Now, if you’re still reading but want to hear how this came to pass, I give you the long story
During my Masters degree I had used strain gauges. I needed a tiny load cell to test active suspension. It worked but wasn’t great. I decided to take these “student strain gauges” for a side project. My FSA vero crank, instrumented like almost all crank based meters, showed some results, but it was noisy, drifting, and unusable. After much experimentation I found that cheap off the shelf electronics were not cutting it. I shelved the idea and started working on some training software for use with the regressed power curve of my Kurt Kinetic. That was 2009 – 2011.
In the meantime a friend of mine in Waterloo was doing a Masters with someone at Babcock and Wilcox, the nuclear steam generator company, and passed off my resume. Five interviews, a security background check, and relocating my life from St. John’s, NL to Cambridge, Ontario I was now working in Nuclear Engineering. Most of my work was Finite Element Analysis, or FEA. Essentially I my intuitive understanding of how mechanics, stress, strain, deformation, etc work was being put to work for steam generators. I had been using FEA since the second year of my undergrad and at that point had used FEA on and off for almost six years. I even wrote a free book on using Ansys and FEA to design race car chassis' (link here).
It wasn’t long before a customer concern required experimental work measuring strain. Prior work was inconclusive. I heard the design manager going cube to cube in cube-ville (which was my home) and I ran after him (coffee in hand) and said I know a and used strain gauges, Eventually I disclosed my electronic hacking which had been featured on Hackaday and I was chosen as the ideal candidate.
However, I needed credentials. Everyone knows most engineers never touch things with their hands, but in order to do strain gauges I would. I’d add it to my machining and welding skills. So I was sent to a strain gauge course. After the courseof training later I knew exactly how to fix my vero crank powermeter! I was excited beyond belief. The problems I had seen were so minor!
For the next year I spent most of my time conducting experiments at B&W using strain gauges to great customer satisfaction. Between my FEA, electronics, and attention to detail combined with my knowledge of Design of Experiments and higher level statistics my work was deemed impeccable in execution. I was achieving 1% error with theoretical. A former Pratt and Whitney employee now at B&W stated his work was up to 15% error. I was so proud to be executing things at such an accurate level. In the mean time I had spent thousands of dollars and countless hours building up my own circuit boards and instrumenting cranks.
Vero, which was never self contained, was V1. Later a C-channel shaped SRAM Rival was V2. It was arduino pro micro based with an AP1 ANT+ stick from sparkfun and some analog components that weren’t suitable. V3 combined those onto a Rival OCT (hollow forged) crankset. However there was issues, clearances, etc. I had tried some different ideas and realized forces on a crank aren’t as simple as the industry thinks (or markets). However, I got my powermeter on the famed Hackaday and tens of thousands of visits to my little blog later I felt I was on to something.
So for V4, I moved to a lot of new components and a small custom board. I spent countless hours pouring over datasheets to chose the components. I built both a Rival OCT and Carbon S900 / Quarq unit. Both worked well. Very well. In fact I was on the verge of building up a bunch and starting to beta test. I had a listing of people who were interested from all over the world.
I got an email from the father of a lady who works at 4iiii’s. He was so interested in my work and has remained a strong believer of me. Eventually it seemed to fall to the wayside of the people there or was being evaluated at a slower pace than I wanted. However I liked this company. The founder had built Dynastream, the creator of ANT+. I was impressed. So I eventually sent him a message on Linked In.
A few super early morning calls later and I was using my barely touched vacation time to impromptu fly to Alberta to meet this guy and his team with my bike in tow. I had no idea what to expect. A short drive from Calgary to Cochrane later and I find a small building labeled the 4iiii Innovation Centre.
I had mucked around adjusting code on the carbon crank for more accuracy and messed up some math, so eventually I swapped in my Rival the night before. The battery kept disconnecting during the demo in his office but he was convinced.
Some interviewing and a discussion later on what he wanted to bring to market and I was confused, full of reservations but generally sold. He wanted user installable. He didn’t want into the crank buying, installing, selling market. He wanted to let people have choice. He wanted to drop the price and change the game.
I spent most of the next 6 months working on the basics. Can it be done? What material? What gauges? etc. What I found was that 2% bending error was not actually achievable on a crank arm with the generally accepted setup (a bending bridge). If you narrow your scope to a fine window it does but that didn’t sit well, but if you start introducing some cases that fall to the edge of the norm just a tiny bit (and encountered regularly in mountain biking) you’ll find that it’s closer to +/- 7% to +/-9% on torque accuracy depending on the setup. Let alone rotational accuracy from an accelerometer algorithm.
I’m 4 months in, looking at these numbers thinking I’m a not going to be able to pull it off - not with the accuracy everyone is claiming! I quietly start looking for a solution. How do I make this better. I’ve figured out the fundamental issues with user install but how do meet the accuracy. It doesn’t change from user install to pro installed. I tried angling the sensors, adjusting things, compensating for the non-symmetric cross section of the crank. Nothing!
Then I tried something else. What about adding a second setup! Something that can sense torque but that is very different from the first. Then, using my Design of experiments mythology and statistics I figured out that there is a super cool correlation. I was blown away! This was big, this was the answer to my hopes to get me that 2%. Not only that, but generally gave 0.5% error! This idea is so revolutionary that we put patent pending in place on this technology, among many other things.
We needed to package it, and admittedly the packaging isn’t perfect for the drive side and the last few years we’ve seen a mess in bottom brackets and now we’re seeing a mess on the chain ring bolt patterns causing incompatibility of some manufacturers cranks. This is sad. However I’m glad to say the last 3 generations of Shimano 105 (5600, 5700, 5800) work, Ultegra (6600, 6700, 6800 {this is actually epoxied together!]), and Dura-Ace (7800, 7900, 9000) all work. The latest Deore XT works for the Shimano MTB front. The 10 Speed SRAM Rival OCT works (my original workhorse on the prototype front) and the X9 looks good. FSA Energy is good too but their new 5 bolt asymmetric and SRAM’s 11 speed put bolts where we want the sensor. We are still searching for a solution. On the Carbon front the SRAM S900 works but we haven’t finalized our testing. We will be recommending using the calibration load cell that comes with the kit every year at least to check calibrations depending on crank arm.
Right now the product works, but in my bosses opinion is huge physically, so there will be a shrink in size and weight when we ship in a few months. This will also improve install-ability and compatibility as well as easing access to the battery.
However, one of the coolest things I’ve done which I hope to open to the public is my test data on the existing meters. It turns out it my original bending only design was better than existing solutions but was still +/-7% while the best off the shelf solution once we hacked into it’s sensor produced +/- 9% when we introduces pedal offsets.
Enjoy the promo code while it lasts. It’s our gift to you guys who believed in me on a personal level and going forward believing that we change the face of power for serious athletes at all financial levels.
*gage is generally considered the American spelling and gauge the British form.
Subscribe to:
Posts (Atom)